
Podstawy chirurgii robotycznej (Fundamentals of robotic surgery – FRS) to program nauczania oparty na progresynwym dochodzeniu do biegłości opracowany przez ekspertów chirurgii robotycznej z wielu dziedzin chirurgii w celu uzupełnienia luk w istniejących programach nauczania chirurgii robotycznej. RobotiX Mentor to platforma szkoleniowa w wirtualnej rzeczywistości dedykowana chirurgii robototycznej. Naszym celem było ustalenie, czy nowicjusze w dziedzinie chirurgii robotycznej będą mieć lepsze umiejętności techniczne po ukończeniu szkolenia FRS na platformie RobotiX Mentor oraz porównanie skuteczności FRS na różnych platformach szkoleniowych.
W dwóch centrach symulacji akredytowanych przez American College of Surgeons Accredited Education Institutes przeprowadzono obserwacyjne, wieloośrodkowe badanie pre-post z zaślepieniem oceniającego. Nowicjusze w zakresie chirurgii robotycznej (n = 20) zostali zakwalifikowanie do badania i przeszkoleni do poziomu wzorców ustalonych w oparciu o umiejętności ekspertów przy użyciu FRS na formie RobotiX Mentor. Wyjściowe umiejętność uczestników oceniano przed (pre-test) i po (post-test) szkoleniu na modelu tkanki ptasiej. Testy zostały nagrane i ocenione przez zaślepionych oceniających przy użyciu Globalnej Oceny Umiejętności Robotycznych (Global Evaluative Assessment of Robotic Skills – GEARS) i psychomotorycznej listy kontrolnej obejmującej 32 kryteria. Przeprowadzono porównania post hoc z wcześniej opublikowanymi wynikami grup referencyjnych. W testach T ze sprawowanymi próbkami uczestnicy wykazali lepszą wydajność we wszystkich domenach GEARS (p <0,001 do p = 0,01) oraz w odniesieniu do czasu (p 0,001) i błędów (p = 0,003) mierzonych za pomocą psychometrycznej listy kontrolnej. Według analizy wariancji ANOVA poprawa umiejętności nowicjuszy po szkoleniu FRS na platformie RobotiX Mentor nie była gorsza od poprawy zgłoszonej po szkoleniu FRS na wcześniej wydanych platformach. Ukończenie szkolenia FRS na platformie RobotiX Mentor zaowocowało poprawą umiejętności w zakresie chirurgii robotycznej wśród nowicjuszy, co dowodzi skuteczności treningu. Dane te dostarczają dodatkowych dowodów na ważność zastosowania FRS i wspierają wykorzystanie RobotiX Mentor w nabywaniu umiejętności chirurgii robotycznej.
Program nauczania podstaw chirurgii robotycznej
Zastosowanie chirurgii robotycznej rozprzestrzeniło się szeroko od momentu wprowadzenia tej technologii do praktyki klinicznej w połowie lat 90. XX wieku. Aby szkolić chirurgów w zakresie bezpiecznego, skutecznego stosowania chirurgii robotycznej, indywidualni badacze i organizacje opracowali różne programy nauczania umiejętności, a przed zastosowaniem chirurgii robotycznej w praktyce klinicznej wymagany jest obowiązkowy udział w sponsorowanej przez branżę ścieżce szkolenia z chirurgii robotycznej [1–5]. Jednak pomimo coraz częstszego wdrażania tej formy chirurgii, programy nauczania z zakresu robotyki różnią się pod względem struktury, treści i wymagań dotyczących biegłości. Jest to szczególnie prawdziwe w przypadku programów nauczania skierowanych do początkujących chirurgów. Green i in. opisali niedawno aktualny stan programów nauczania z zakresu chirurgii robotycznej w 12 programach specjalizacji w zakresie rezydentury z chirurgii ogólnej w Stanach Zjednoczonych. Zidentyfikowali krytyczne luki w treści istniejących programów nauczania w zakresie nabywania umiejętności technicznych oraz w nauczaniu ważnych zasad stosowanych śródoperacyjnie, takich jak obchodzenie się z tkankami [6]. Jako optymalny sposób usunięcia tych luk wykazano, że postęp dążący do biegłości skutecznie przyspiesza nabywanie umiejętności i zapewnia jej trwałość [2, 4, 5, 7–13]. Program nauczania podstaw chirurgii robotycznej (Fundamentals of Robotic Surgery – FRS) jest progresywnym programem dążącym do biegłości, który został opracowany przez 66 ekspertów chirurgii robotycznej z wielu dziedzin chirurgii z wykorzystaniem pełnego cyklu programu nauczania [14, 15]. Program nauczania składa się z modułów dydaktycznych i opartego na symulacji programu nabywania podstawowych umiejętności z zakresu chirurgii robotycznej. W niedawno przeprowadzonym wieloośrodkowym, wielonarodowym, randomizowanym badaniu z grupą kontrolną dotyczącym skuteczności tego programu nauczania w podnoszeniu podstawowych umiejętności w zakresie chirurgii robotycznej u rezydentów efekty wykazano w oparciu o model treningu fizycznego oraz w dwóch symulatorów szkolenia w rzeczywistości wirtualnej (virtual reality – VR) [15]. Od czasu przeprowadzenia tej\go badana na rynek wprowadzono RobotiX Mentor, który jest samodzielną platformą symulacyjną w rzeczywistości wirtualnej opracowaną przez 3D Systems (wcześniej Simbionix) do szkolenia umiejętności robotycznych. Naszym celem w tym badaniu było ustalenie, czy nowicjusze w zakresie chirurgii robotycznej wykażą lepszą wydajność umiejętności technicznych po ukończeniu szkolenia umiejętności psychomotorycznych dążących do biegłości w oparciu o program nauczania FRS przy użyciu platformy RobotiX Mentor VR oraz porównanie skuteczności platformy RobotiX Mentor VR z innymi wcześniej wydanymi platformami szkoleniowymi opartymi na FRS.
Metody
Przeprowadzone badanie było obserwacyjnym, wieloośrodkowym badaniem pre-post z zaślepieniem oceniającego. Stronami uczestniczącymi były dwie instytucje szkolnictwa wyższego z certyfikowanymi ośrodkami akredytowanymi przez American College of Surgeons Education Institutes (ACS-AEI). Obie instytucje otrzymały zgodę lokalnej komisji bioetycznej przed wykonaniem protokołu badania. Uczestnikami rekrutowanymi do badania byli rezydenci z zakresu akredytowanych przez Radę Podyplomowej Edukacji Medycznej (Accreditation Council for Graduate Medical Education (ACGME)) programów urologii, ginekologii lub chirurgii ogólnej. Uczestnicy byli początkujący w odniesieniu do umiejętności chirurgii robotycznej zgodnie z pięciostopniowym modelem rozwoju kompetencji braci Dreyfus [16]. Na początku szkolenia uczestnicy, którzy przystąpili do wypełnienia protokołu badania, mieli średnio zaledwie 0,6 godziny wcześniejszego doświadczenia na dowolnym symulatorze chirurgii robotycznej (zakres 0–4 godzin) i wykonali średnio mniej niż 0,5 zabiegów z zakresu chirurgii robotycznej jako asystent przy stole (zakres 0– 2 przypadków). Żaden uczestnik nigdy nie przeprowadził zabiegu z zakresu chirurgii robotycznej jako główny operator. Średni wiek uczestników, którzy ukończyli protokół wynosił 30,5 lat (odchylenie standardowe = 3,4 lat). W badaniu uczestniczyła jedna kobieta. Jeden uczestnik był leworęczny (Tabela 1).
Tabela 1 Dane demograficzne uczestników

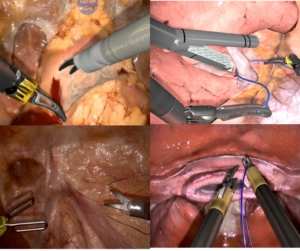
Uczestnicy najpierw zapoznali się z modułami dydaktycznymi online programu nauczania FRS i musieli zdać egzamin poznawczy FRS [17]. Podstawowe umiejętności uczestników w zakresie chirurgii robotycznej zostały następnie ocenione (przed testem) na wcześniej opisanym modelu tkanki ptasiej [15] przy użyciu systemu chirurgicznego da Vinci Si (Intuitive Surgical Inc., Sunnyvale, Kalifornia). W skrócie, model tkanki ptasiej pozwala na wykonanie pięciu zadań technicznych, które odzwierciedlają zadania szkoleniowe FRS i są związane z wykonywaniem operacji robotycznych (wiązanie węzłów, szycie, cięcie, układanie puzzli 3D oraz odwarstwienie naczyń i zastosowanie diatermii). Wcześniej opublikowano dowody dotyczące ważności zastosowania tego modelu jako narzędzia oceny programu nauczania FRS [15].
Po dokonaniu oceny wyjściowej uczestnicy zostali przeszkoleni w oparciu o progresywny program nauczania mający na celu osiągnięcie biegłości w zakresie zadań FRS (dokowanie, przenoszenie pierścienia, wiązanie węzłów, szycie, cięcie, układanie puzzli 3D oraz odwarstwienie naczyń i zastosowanie diatermii) przy użyciu platformy RobotiX Mentor VR. Poziomy biegłości eksperckiej (poziomy odniesienia) zostały ustalone przez sześciu ekspertów wykonujących wszystkie siedem zadań za zakresu programu nauczania FRS na platformie RobotiX Mentor VR do momentu, aż nie zaobserwowano żadnej poprawy wydajności podczas dwóch kolejnych prób. Wykluczono wyniki skrajne, a pozostałe wyniki ekspertów zostały następnie uśrednione dla każdego zadania. Zgodnie z progresywnym modelem progresji dążenia do biegłości programu nauczania FRS, celem szkolenia uczestników było wykonanie każdego kolejnego zadania na takim poziomie, jak wskaźniki odniesienia ustawione przez ekspertów w zakresie chirurgii podczas dwóch kolejnych prób przed przejściem do następnego zadania. Po pomyślnym zakończeniu wszystkich zadań szkoleniowych z zakresu programu nauczania FRS na platformie VR uczestnicy zostali ponownie poddani testowi na modelu tkanki ptasiej (post-test).
Ocena wyników przez ekspertów w dziedzienie chirurgii robotycznej
Postępowanie uczestników przed i po teście zostało nagrane w formie filmu przy użyciu lokalnych urządzeń do nagrywania wideo i przesłane do Crowd-Sourced Assessment of Technical Skills (C-SATS, Seattle, WA), przechowywane w chmurze zgodnie z HIPAA [18]. Pod koniec trwania badania wszystkie filmy wideo zostały przejrzane przez dwóch ekspertów oceniających z ramienia C-SATS. Badanie zostało przeprowadzone z zaślepieniem oceniających pod kątem status przed i po teście, uczestnika i instytucji. Obaj oceniający z ramienia C-SATS zastosowali skalę globalnej oceny umiejętności robotycznych (Global Evaluative Assessment of Robotic Skills – GEARS) do oceny wyników uczestników. GEARS to narzędzie do oceny umiejętności operacyjnych z zakresu chirurgii robotycznej w pięciu domenach (percepcja głębokości, zręczność dwuręczna, wydajność, użycie siły i kontrola przyrządu); obejmuje 5-punktową zakotwiczoną skalę Likerta dla każdej domeny i wcześniej udowodniono ważność jej zastosowania w odniesieniu do modelu tkanki ptasiej zastosowanego w ocenie przed i po teście (pre-post test) [19]. Rzetelność między oceniającymi (Inter-rater reliability – IRR) obliczono między tymi dwoma oceniającymi, a końcowe wyniki GEARS obliczono jako średnią wyników dwóch oceniających. Wyniki te nie miały rozkładu normalnego, dlatego do porównania wyników GEARS przed badaniem z wynikami GEARS po badaniu zastosowano nieparametryczne, sparowane testy T. Porównano zarówno skumulowane wyniki wydajności, jak i wyniki wydajności specyficzne dla domeny.
Na zakończenie badania filmy z wyników przed i po teście zostały ocenione przez jednego lokalnego oceniającego w każdej z dwóch uczestniczących instytucji. Obaj oceniający byli ekspertami w dziedzinie chirurgii robotycznej. Lokalni oceniający zastosowali psychomotoryczną listę kontrolną składającą się z 32 kryteriów, która została opracowana w celu konkretnej oceny wydajności w zadaniach wykonywanych na modelach tkanek ptasich.
Psychomotoryczna lista kontrolna pozwala na ocenę czasu i błędów i była wcześniej kojarzona z wysoką rzetelnością między oceniającymi (IRR = 0,82–0,97) wśród różnych par oceniających [15]. Sparowane, nieparametryczne testy T zastosowano do porównania wyników psychomotorycznej listy kontrolnej przed i po teście. Dodatkowo przeprowadzono jednokierunkową analizę wariancji (ANOVA) w celu porównania wyników psychometrycznej listy kontrolnej uczestników szkolenia na platformie RobotiX Mentor z wynikami psychometrycznej listy kontrolnej nowicjuszy w zakresie chirurgii robotycznej (Tabela 2) z innego niedawno opublikowanego badania pre-post dotyczącego programu nauczania FRS przeprowadzonego przez Satava et al. Nowicjusze w zakresie chirurgii robotyczej w badaniu Satava et al albo uczestniczyli w programie Intuitive da Vinci bez szkolenia FRS („kontrola”); ukończyli szkolenie FRS na fizycznym modelu ćwiczeniowym, FRS Physical Dome („Dome”, Florida Hospital Nicholson Center, Celebration, Floryda); lub ukończyli szkolenie FRS na jednej z dwóch platform VR – symulatorze da Vinci backpack VR („DVSS”, 3D Systems, Tel Awiw, Izrael) lub symulatorze chirurgii w rzeczywistości wirtualnje Mimic („dV-Trainer”, Mimic Technologies, Inc., Seattle, WA). Należy zwrócić uwagę, że tylko rezydenci zostali rekrutowani do grupy RobotiX Mentor, asystenci i specjaliści z grupy Dome, DVSS, dVTrainer i grup kontrolnych badania Satava et al. zostali celowo wyłączeni z analizy porównawczej, tak że porównywano jedynie wyniki rezydentów we wszystkich grupach.
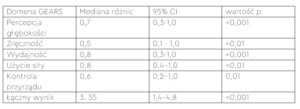
Tabela 2 Poprawa wydajności od momentu przed do po teście, zgodnie z domenami GEARS
Wyniki
Dwudziestu rezydentów, którzy byli nowicjuszami w zakresie chirurgii robotycznej, początkowo zapisano do udziału w badaniu dotyczącym RobotiX Mentor, z których trzynaście (n = 13) ukończyło program nauczania FRS i wykonało zadania na modelu tkanek ptasich po teście (wskaźnik nieukończenia 35%). Dane GEARS po teście dwóch uczestników były niekompletne, więc uczestnicy zostali wykluczeni z analizy GEARS.
Czas przed badaniem innego uczestnika był znaczącą wartością odstającą – ponad pięć standardowych odchyleń powyżej średniej – i dlatego uczestnik ten został wykluczony z analizy danych z psychomotorycznej listy kontrolnej. W teście znakowym zależnych próbek wszyscy uczestnicy, którzy ukończyli protokół badania, wykazali lepszą wydajność po teście w stosunku do przed testem, mierzoną wynikami GEARS. Było to prawdziwe zarówno dla ogólnego skumulowanego wyniku (p < 0,001), jak i dla poszczególnych domen GEARS (p = 0,01 do p <0,001), jak podano w Tabeli 2. „Mediana różnic” jest interpretowana jako mediana poprawy wyniku GEARS od momentu przed testem do po teście.
To ulepszenie od momentu przed do po teście jest dodatkowo wizualizowane w tabeli i wąsach wyników GEARS na Rycinie 2. Wystąpiła nieistotna dodatnia korelacja (r = 0,58, p = 0,06) między skumulowanymi wynikami GEARS przed i po teście. Spośród określonych domen GEARS jedyną istotną dodatnią korelacją między wynikami przed i po teście była wydajność (r = 0,71, p = 0,01). Rzetelność między dwoma oceniającymi z ramienia C-SATS w zakresie wyniku GEARS wynosiła 0,43 (0,8) dla wyników przed testem i 0,41 (1,0) dla wyników po teście.
W testach T sparowanych próbek wyników psychomotorycznej listy kontrolnej wykazano ponownie znaczną poprawę uczestników od momentu przed testem do po teście. Dotyczyło to zarówno czasu do zakończenia zadania (t (11) = 7,42, p <0,001), jak i liczby błędów (t (11) = 3,80, p = 0,003). Liczba błędów w momencie przed testem była znaczącym predyktorem liczby błędów w momencie po teście (r = 0,64, p = 0,03), podczas gdy czas przed testem nie był istotnym predyktorem czasu po teście (r = 0,55, p = 0,07). Według jednokierunkowej analizy wariancji nie stwierdzono istotnych różnic w zakresie wartości wyjściowej czasu przed testem (F (4,49) = 1,86, p = 0,13) lub błędów przed testem (F (4,49) = 1,78, p = 0,15) między grupą RobotiX Mentor a Dome (n = 11), DVSS (n = 9), dV-Trainer (n = 12) i grupami kontrolnymi (n = 10) z badania Satava et al. Podobnie, nie zaobserwowano istotnych różnic w poprawie wydajności od momentu przed do po teście między którąkolwiek z grup z obu badań dla czasu (F (4,49) = 1,20, p = 0,32) lub błędów (F (4,49 ) = 1,11), p = 0,36). Zmiany w zakresie czasu i błędów od momentu przed testem do po teście dla każdej grupy przedstawiono na Rycinach 3 i 4. Więcej wartości ujemnych (skrócenie czasu, zmniejszenie błędów) wskazuje na większą poprawę.
Większa wydajność umiejętności technicznej po ukończeniu programu
W naszym badaniu nowicjusze w zakresie chirurgii robotycznej wykazali lepszą wydajność umiejętności technicznych w chirurgii robotycznej po ukończeniu progresywnego programu dążącego do biegłości opartego na programie nauczania FRS na platformie szkoleniowej RobotiX Mentor VR. Umiejętności nabyte podczas szkolenia na tym symulatorze VR przeniesiono do realistycznego modelu (model tkanki ptasiej), który jest odpowiedni do zasymulowania wykorzystania rzeczywistego robota w praktyce klinicznej. Wyniki te są spójne z innymi badaniami, które wykazały poprawę poziomu pewności i umiejętności technicznych uczestników po uczestnictwie w zorganizowanych programach poprawy umiejętności chirurgii robotycznej [20, 21]. Ponadto każdy uczestnik programu RobotiX Mentor wykazał poprawę wyników od momentu przed testem do po teście w zakresie czasu, błędów i we wszystkich unikatowych domenach GEARS po zakończeniu programu nauczania.
Spośród elementów GEARS zaobserwowane usprawnienia w zręczności, użyciu siły i kontroli przyrządów potencjalnie rozwiązują zidentyfikowaną przez Green et al lukę w nauce obchodzenia się z tkankami wśród obecnie obowiązujących programów nauczania [6]. Co ważne, poprawa umiejętności robotycznych nowicjuszy zaobserwowana w grupie stosującej platformę RobotiX Mentor VR nie była gorsza niż poprawa zaobserwowana wśród nowicjuszy, którzy również szkolili się w oparciu o program nauczania FRS przy użyciu dwóch innych platform VR (dV Trainer, DVSS) i którzy zostali oceniani za pomocą tego samego modelu tkanki ptasiej i psychometrycznej listy kontrolnej [15]. Sugeruje to, że jakość programu nauczania może być ważniejsza dla efektywnego nabywania umiejętności niż faktyczna platforma symulacyjna. Rzeczywiście, Satava et al. stwierdzili jedynie niewielkie różnice w w zakresie wyników uczestników wszystkich ocenianych platform szkoleniowych [15].
Ograniczeniem tego badania jest brak prawdziwej równoległej grupy kontrolnej, z którą można by porównać poprawę wyników przed i po teście. Chociaż przedstawiciele grupy kontrolnej, której dane zostały pożyczone, aby służyć jako komparator, uczestniczyli w programie Intuitive da Vinci bez szkolenia w oparciu o program nauczania FRS, wdrożenie programu nauczania FRS w ich ośrodkach mogło mieć wpływ na wprowadzenie dodatkowej praktyki, co doprowadziło do wyższej niż oczekiwana poprawa, jak wcześniej informowali Satava et al. [15] Teoretycznie samo zastosowanie modelu tkanki ptasiej w ocenie przed testem mogło wystarczyć do osiągnięcia poprawy wydajności po teście, z udziałem lub bez udziału w programie szkolenia. Jednak brak znaczących, dodatnich korelacji między czasem przed i po teście a wynikami GEARS nie potwierdza, że procedura przed testem doprowadziła do większej znajomości lub wygody po teście.
Ponadto jest mało prawdopodobne, aby spodziewać się znacznej poprawy wydajności w przypadku braku szkolenia. Wadą badania był również wysoki stopień nieukończenia, a siedmiu z początkowych 20 uczestników grupy RobotiX Mentor nie ukończyło protokołu. Administratorzy badania przypisują to priorytetowi praktykantów w zakresie obowiązków klinicznych nad praktyką umiejętności robotycznych oraz rotacjom w wielu miejscach szkoleniowych, niezależnie od lokalizacji symulatorów.
Jest to zgodne z niedawno opublikowanym artykułem Tam et al., w którym 13 z 24 rezydentów podobnie rozpoczęło, ale nie ukończyło programu szkolenia z zakresu umiejętności robotycznych (54% wskaźnik nieukończnia). Podczas ankiety dziesięciu rezydentów uczestniczących w tym badaniu przypisywało nieukończenie ustaleniu priorytetów obowiązków klinicznych i działań badawczych oraz brakowi fizycznego dostępu do symulatora z powodu staży w innych ośrodkach [22]. W trwających badaniach przeprowadzonych przez członków naszej grupy badawczej przenieśliśmy symulatory z centralnego laboratorium umiejętności do szpitali, w których rezydenci odbywają staże w nadziei na usunięcie przynajmniej tej jednej bariery uczestnictwa.
W analizie post hoc wyników GEARS uczestnicy naszego badania, którzy ukończyli program nauczania i wykonami zadania po teście, nie mieli znacząco różnych wyników przed testem w porównaniu z uczestnikami, którzy tylko ukończyli zadania przed testem, ale nie ukończyli pozostałej części protokołu szkolenia (W = 33,5, p = 0,68). Innymi słowy, wszyscy uczestnicy mieli na początku podobną wyjściową wydajność, co sugeruje, że nieukończenie nie było spowodowane wczesną słabą wydajnością. Podobnie nie było znaczących demograficznych predyktorów wydajności wśród uczestników szkolenia na platformie RobotiX Mentor i pomimo faktu, że każdy uczestnik, który ukończył program nauczania, poprawił się, byliśmy tylko w stanie wykazać, że nie jest gorszy od szkolącego się na innych platformach. Dlatego musimy również wziąć pod uwagę możliwość, że nieukończenie doprowadziło do wystąpienia błędu drugiego rodzaju.
Wreszcie, wewnętrzna rzetelność między dwoma oceniającymi (IRR) z ramienia C-SATS stosujących narzędzia GEARS była umiarkowana. Była ona jednak wyższa niż pożądana rzetelność między oceniającymi w zakresie użycia narzędzia GEARS w badaniu Satava et al. [15] Możemy jedynie spekulować, dlaczego tak się stało. Inni autorzy zgłosili wysoką rzetelność między oceniającymi w zakresie wykorzystania narzędzia GEARS po „fazie osiągnięcia biegłości” w celu wypracowania wstępnej zgody między ekspertami oceniającymi, a także wysoką alfę Cronbacha między ekspertami oceniającymi a wynikami GEARS pozyskiwanymi z większej populacji przez C-SATS [23]. Być może rzetelność między oceniającymi w tym przypadku można by poprawić, gdyby oceniający przeszli bardziej rygorystyczne szkolenie przed przeprowadzeniem oceny. Podsumowując, ukończenie programu nauczania FSE opartego na dążeniu do biegłości na platformie treningowej RobotiX Mentor VR zaowocowało lepszą wydajnością umiejętności chirurgii robotycznej wśród nowicjuszy w zakresie chirurgii robotycznej z wynikami podobnymi do tych osiągniętych na wcześniej wydanych platformach VR. Dane te dostarczają dalszych dowodów na prawdziwość zastosowania samego programu nauczania FRS i wspierają wykorzystanie programu FRS na platformie RobotiX Mentor jako dodatkowej platformy symulacyjnej VR do nabywania umiejętności robotycznych.
Wkład autorów: Wszyscy autorzy, których nazwiska widnieją w zgłoszeniu, wnieśli znaczący wkład w koncepcję lub projekt artykułu; lub pozyskiwanie, analizę lub interpretację danych; opracowali artykuł lub krytycznie go poprawili pod kątem ważnych treści intelektualnych; zatwierdzili wersję do opublikowania; oraz zgadzają się ponosić odpowiedzialność za wszystkie aspekty artykułu, zapewniając, że pytania dotyczące dokładności lub integralności dowolnej części artykułu są odpowiednio zbadane i rozwiązywane. Finansowanie: Instytut Doskonałości Chirurgicznej (The Institute for Surgical Excellence ISE – ISE), publiczna organizacja charytatywna 501 (c) (3) wspierająca edukację chirurgiczną, otrzymała grant i zapewniła wsparcie administracyjne dla przeprowadzenia tego badania.
Zgodność ze standardami etycznymi
Konflikt interesów: Autorzy (John Rhodes Martin, Dimitrios Stefanidis, Ryan P. Dorin, Alvin C. Goh, Richard M. Satava i Jeffrey S. Levy) deklarują, że nie mają istotnych konfliktów interesów. Zatwierdzenie etyczne: Badanie zostało zatwierdzone przez lokalną komisję bioetyczną i przeprowadzone w dwóch ośrodkach symulacyjnych certyfikowanych przez American College of Surgeons Educational Institutes (ACS-AEI). Zgoda na udział: Uzyskano indywidualną świadomą zgodę od wszystkich uczestników badania.
Piśmiennictwo:
1. (2018) da Vinci Training. Intuitive Surgical, Inc. https://www.intui tivesurgical.com/training. Accessed 22 Jan 2019
2. Arain NA, Dulan G, Hogg DC, Rege RV, Powers CE, Tesfay ST, Hynan LS, Scott DJ (2012) Comprehensive proficiency-based inanimate training for robotic surgery: reliability, feasibility, and educational benefit. Surg Endosc 26:2740–2745
3. Connolly M, Seligman J, Kastenmeier A, Goldblatt M, Gould JC (2014) Validation of a virtual reality-based robotic surgical skills curriculum. Surg Endosc 28:1691–1694
4. Dulan G, Rege RV, Hogg DC, Gilberg-Fisher KM, Arain NA, Tesfay ST, Scott DJ (2012) Developing a comprehensive, proficiencybased training program for robotic surgery. Surgery 152:477–488
5. Dulan G, Rege RV, Hogg DC, Gilberg-Fisher KM, Arain NA, Tesfay ST, Scott DJ (2012) Proficiency-based training for robotic surgery: construct validity, workload, and expert levels for nine inanimate exercises. Surg Endosc 26:1516–1521
6. Green CA, Chern H, O’Sullivan PS (2018) Current robotic curricula for surgery residents: a need for additional cognitive and psychomotor focus. Am J Surg 215:277–281
7. Ahlberg G, Enochsson L, Gallagher AG, Hedman L, Hogman C, McClusky DA 3rd, Ramel S, Smith CD, Arvidsson D (2007) Proficiency-based virtual reality training significantly reduces the error rate for residents during their first 10 laparoscopic cholecystectomies. Am J Surg 193:797–804
8. Angelo RL, Ryu RK, Pedowitz RA, Beach W, Burns J, Dodds J, Field L, Getelman M, Hobgood R, McIntyre L, Gallagher AG (2015) A proficiency-based progression training curriculum coupled with a model simulator results in the acquisition of a superior arthroscopic bankart skill set. Arthroscopy 31:1854–1871
9. Cates CU, Lönn L, Gallagher AG (2016) Prospective, randomised
and blinded comparison of proficiency-based progression fullphysics virtual reality simulator training versus invasive vascular experience for learning carotid artery angiography by very experienced operators. BMJ Simulat TechnolEnhanced Learn 2:1–5
10. Gallagher AG (2012) Metric-based simulation training to proficiency in medical education: what it is and how to do it. Ulster Med J 81:107–113
11. Gallagher AG, O’Sullivan GC (2011) Fundamentals of surgical simulation: principles & practice. Springer, New York
12. Gallagher AG, Ritter EM, Champion H, Higgins G, Fried MP, Moses G, Smith CD, Satava RM (2005) Virtual reality simulation for the operating room: proficiency-based training as a paradigm shift in surgical skills training. Ann Surg 241:364–372
13. Stefanidis D (2010) Optimal acquisition and assessment of proficiency on simulators in surgery. Surg Clin N Am 90:475–489
14. Zevin B, Levy JS, Satava RM, Grantcharov TP (2012) A consensus-based framework for design, validation, and implementation of simulation-based training curricula in surgery. J Am Coll Surg 215(580–586):e583
15. Satava RM, Stefanidis D, Levy JS, Smith R, Martin JR, Monfared S, Timsina LR, Darzi AW, Moglia A, Brand TC, Dorin RP, Dumon KR, Francone TD, Georgiou E, Goh AC, Marcet JE, Martino MA, Sudan R, Vale J, Gallagher AG (2019) Proving the
effectiveness of the fundamentals of robotic surgery (FRS) skills curriculum: a single-blinded, multispecialty, multi-institutional randomized control trial. Ann Surg. https://doi.org/10.1097/ SLA.0000000000003220 (Publish Ahead of Print)
16. Dreyfus SE (2004) The five-stage model of adult skill acquisition. Bull Sci Technol Soc 24:177–181
17. (2018) Fundamentals of robotic surgery curriculum. Case network http://www.frssurgery.org/frs-curriculum/. Accessed 22 Jan 2019
18. (2018) Crowd-sourced assessment of technical skills. C-SATS http://www.csats.com. Accessed 22 Jan 2019
19. Goh AC, Goldfarb DW, Sander JC, Miles BJ, Dunkin BJ (2012) Global evaluative assessment of robotic skills: validation of a clinical assessment tool to measure robotic surgical skills. J Urol 187:247–252
20. Schommer E, Patel VR, Mouraviev V, Thomas C, Thiel DD (2017) Diffusion of robotic technology into urologic practice has led to improved resident physician robotic skills. J Surg Educ 74:55–60
21. Bertolo R, Garisto J, Dagenais J, Sagalovich D, Kaouk JH (2018) Single session of robotic human cadaver training: the immediate impact on urology residents in a teaching hospital. J Laparoendosc Adv Surg Tech A 28:1157–1162
22. Tam V, Lutfi W, Novak S, Hamad A, Lee KK, Zureikat AH, Zeh HJ 3rd, Hogg ME (2018) Resident attitudes and compliance towards robotic surgical training. Am J Surg 215:282–287
23. White LW, Kowalewski TM, Dockter RL, Comstock B, Hannaford B, Lendvay TS (2015) Crowd-sourced assessment of technical skill: a valid method for discriminating basic robotic surgery skills. J Endourol 29:1295–1301